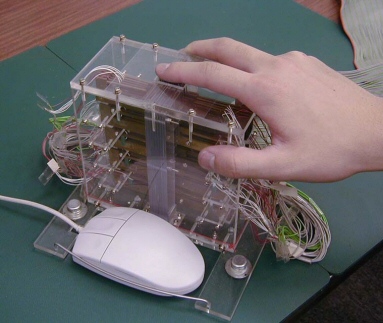
Fig. 1 TextureDisplay2
Fig. 1 TextureDisplay2
Haptic Texture DisplayA haptic display was built in the lab to present texture sensation of object surfaces. Figure 1 shows the TextureDisplay2 (T50-2). The display has a pin array to givefingertip skin mechanical stimulation along with the two-dimensional motion on a desktop for active exploration on virtual textures. A pin-array is at the center of a top board, where fifty blunt piano-wire pins 0.5-mm in diameter are arranged in a 5-column and 10-row lattice with a 2-mm spacing. (This spacing was determined from skin resolution and the size of an actuator.) The user places the index fingerpad on the array measuring approximately 8 x 18 mm2, and holds the whole body with other fingers to move the pin array on a virtual texture. The display body size was reduced to 30 \% in volume of the previous model. The reduction was achieved by the new design of a pin drive mechanism shown in the next section. |
|
|
The frequency of pin vibration was set at 250 Hz where an absolute threshold of cutaneous sensation is minimized as discussed above. Although the frequency is captured most sensitively by Pacinian corpuscles, it is also known that RA afferent responds surely to each pulse indentation produced by the Optacon stimulator at least up to 100 Hz [9]. Past the frequency, the response decreases along with a frequency increase if the sinusoidal wave is constantly added [19]. However in a phasic stimulation, the onset of vibration that is frequently involved during texture exploration is considered to discharge RA afferents. In addition, more importantly the fast update of amplitude or intensity of each pin is crucial to provide information of fine shape changes during a normal finger movement. The pins producing vibratory stimuli are driven by piezo-electric actuators (AE0203D08, NEC Inc.) whose displacement is 9.1 microns at the largest input voltage of 150 V. The displacement is expanded by a cantilever structure. A contact pin is attached to the tip of the cantilever. To find optimal parameters of structure design, the mechanism was analyzed by a simple cantilever model, a single fixed-end beam with a lumped mass added to a free end. The lumped mass including a contact pin was trimmed to accomplish a desired natural frequency. We set this natural frequency of a lever at 270 Hz, shifting it 20 Hz higher from the regular drive frequency of the display. This is because amplitude expansion using resonant structure is advantageous, however the amplitude at the natural frequency is readily affected by a slight change in the contact state between a user's fingerpad and a contact pin.
|
||